NACH OBEN
RUB-STARTSEITE
(current)
Aktuelles
(current)
Team
(current)
Forschung
Schwerpunkte
Projekte
Publikationen
Transfer
Informationsveranstaltungen
Qualifizierungsveranstaltungen
Umsetzung
Infrastruktur
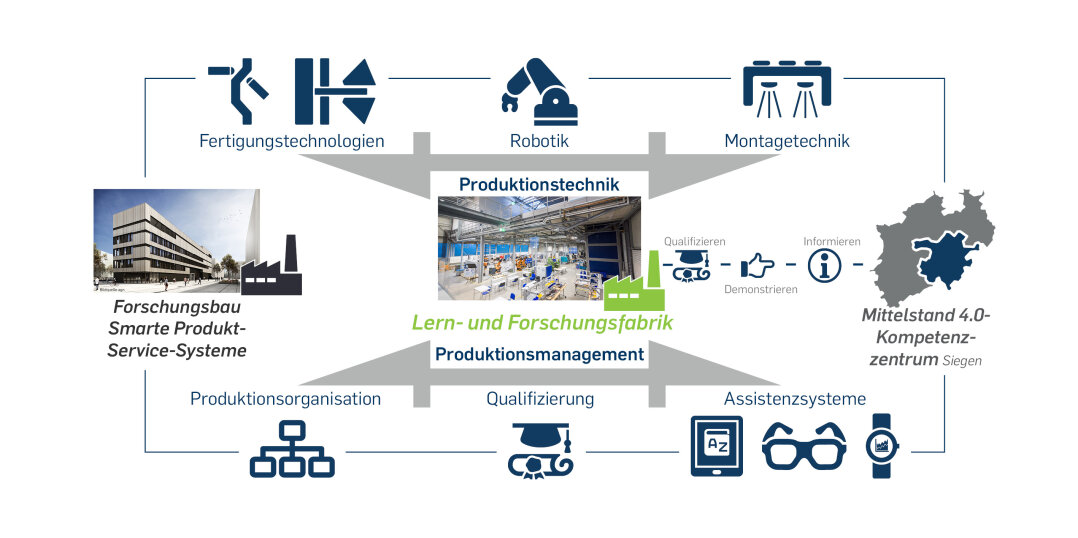
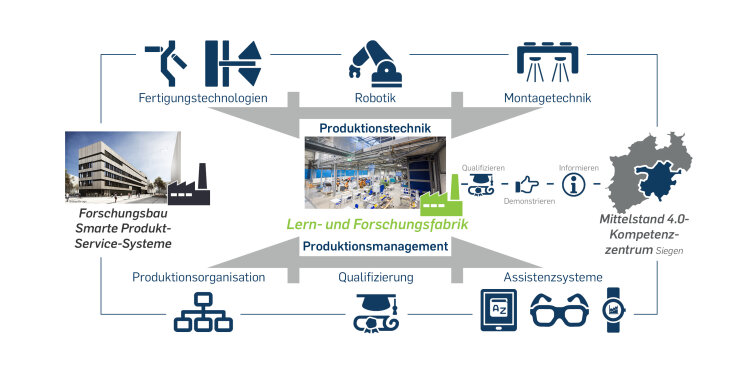
Lern- und Forschungsfabrik
ZESS
Werkstatt
Netzwerke
(current)
Lehre
(current)
Karriere
(current)
Kontakt
(current)
RUB
»
Fakultät Maschinenbau
»
Lehrstuhl für Produktionssysteme
»
Forschung
Schwerpunkte
{kind=link}
{kind=link}
{kind=link}